بنابراین، صنعت ۴.۰ بهمنظور غلبه بر مشکلات فرآیند تصمیمگیری کند و ناکارآمد رباتهای مستقل، مشکلات بکارگیری رباتها در فرآیند تولید و غیره بر این پیشرفتها و همچنین کارهای علمی دانشگاهی مبتنی است. راهحلهای پیشنهادی صنعت و دانشگاه، هر دو شامل اجزای سختافزاری و مولفههای نرمافزاری جدید برای رباتهای عصر جدید است.
1-3- فناوریهای پیشرفته در حوزه حسگرها
از آنجایی که فناوریهای حسگرها در پردازش داده، به اشتراکگذاری و جمعآوری داده مورد استفاده قرار میگیرند، پیشرفتهای فناوری حسگر در کارخانههای صنعت ۴.۰ نقش مهمی دارد. علاوه بر این، شبکهای که در قلب اینترنت اشیاء و رایانش ابری برای جریان دادهها وجود دارد، به پیشرفت فناوری حسگر بیسیم بستگی دارد. در دهه گذشته، بسیاری از حسگرها بمنظور ایجاد ادراک بصری، ادراک شنوایی، تشخیص نیرو، تشخیص مانع، تشخیص فاصله و غیره، توسعهیافتهاند تا به رباتها برای انجام کارهای صنعتی از قبیل استفاده در انتخاب خودکار، جابجایی امن، تشخیص قطعات کمک کنند.
توانایی اساسی رباتها برای به دست آوردن اطلاعات پایه در مورد کارهای صنعتی مبتنی بر دوربین آنها است، در نتیجه پیشرفتهای فناوری دوربینها در پردازش تصویر بسیار در عملکرد رباتها تاثیرگذار است. از آنجا که بینایی ماشین توانایی اساسی برای انجام بسیاری از کارهای صنعتی مانند اجتناب از برخورد با موانع در فضای کار و ردیابی نیروهایی که با ماشینها میکنند، میباشد، فناوریهای بینایی برای استفاده در سیستم بینایی رباتها استفاده می شوند. استفاده از این فناوریها، دوربینها را کوچکتر، مقرونبهصرفهتر با عملکرد بالاتر ساخته و جنبههای جدیدی برای دستیابی به تصویر مانند دید سهبعدی، تصویربرداری فراطیفی (Hyperspectral) و گرفتن تعداد زیادی عکس از یک صحنه در طول موجهای مختلف، و سپس ترکیب آنها برای ارائه اطلاعات عمیق را فراهم میکند. حسگرهای مختلفی وجود دارند که اطلاعات عمق مدل رنگ RGB و ابر نقطهای (Point Cloud) سهبعدی را تولید نموده و پروژکتورهای مادونقرمز و دوربینهایی مانند Microsoft Kinect، Asus Xtion و غیره را پوشش میدهند. بعلاوه، حسگرهای شامل چندین حسگر لیزری مانندVelodyne برای مشکلات تشخیص شی سهبعدی استفاده میشود. چنین بیناییِ سهبعدی فعالیت در بسیاری حوزهها و حتی حوزه هوافضا را ممکن میسازد. همچنین، استفاده از یک حسگر عمق برای یافتن راهحل بدون نشانگر (Marker-less) برای تشخیص مقصد حرکت انسان، رویکرد کنترل چند وجهی برای همکاری ربات با انسان و ارتباطات بصری به منظور انجام کارهای پیچیده توسعه داده شدهاست.
علاوه بر این، برای بهوجود آوردن فضای همکاری امن بین رباتهای صنعتی و اپراتورها در طول تولید، دستگاههای پوشیدنی و اسکنرها به کار گرفته میشوند. همچنین، حسگرهای نیرو در صنعت برای به دست آوردن بازخورد لمسی در حین برداشتن مواد، نصب قطعات محصول و یا مونتاژ قطعات پیچیده به منظور تشخیص برخوردها مورد استفاده قرار میگیرند. علاوه بر این، دریافت بازخورد به افراد اجازه میدهد به طور دستی رباتها را کنترل کنند. در کارخانههای هوشمند، اپراتورها به ساعتهای هوشمند، برای دریافت پیغامهای خطا و مکانهای اشتباه در طول تولید مجهز خواهند شد (Bayram & İnce, 2018).
2-3- هوش مصنوعی
رباتهای صنعتی در کارخانههای هوشمند قادر به پایش، درک و بهینهسازی فرآیند تولید، پیکربندی مجدد محصولات جدید، تشخیص و رفع خطاها هستند. بنابراین رباتها به گونهای طراحی و توسعه داده میشوند که خودآگاهی، خودمراقبتی و خودپیشبینیپذیری داشته باشند. چنین تواناییهایی قابلیتهای ضروری در یک کارخانه هوشمند برای بهبود تولید است. اطمینان از پایش سلامت خود مانند تشخیص عیب موجود در گشتاور، یا تخمین پارامترهای پیکربندی در حین تولید، مثالی در این زمینه است. با این حال، این تواناییها به طور کامل در فرآیندهای تولید واقعی پیادهسازی نشدهاند. این فناوریها (خودآگاهی، خودمراقبتی و خودپیشبینیپذیری) رباتها را قادر میسازد که به دستورها گوش دهند و بدون ارزیابی استمرار (Viability)، ضرورت یا منطق آن، و بدون پرس و جو در رابطه با اثرات این فرآیند، این دستورات را انجام دهند. بنابراین توانایی عملی خودارزیابی در نظر گرفته شده به مراتب از تحقق آن دور است. با استفاده از امکانات رایانش ابری و تحلیل کلان داده، یک سیستم تولید پیشگویانه از ظرفیتهای خودآگاه ماشینها و سیستمها، بمنظور بهبود کارایی و بهرهوری صنعت در آینده بهره میگیرد. تواناییهای مبتنی بر بینایی، رباتهای صنعتی را قادر به تنظیم دقیق موقعیت خود تحت شرایط عدم قطعیت در محیط خارجی میکند، این شرایط شامل خطاهای کالیبراسیون، ناهماهنگی قطعات، عدم تطابق دینامیکی و نقصهای مکانیکی مانند جهش به عقب است.
3-3- اینترنت اشیاء رباتیک
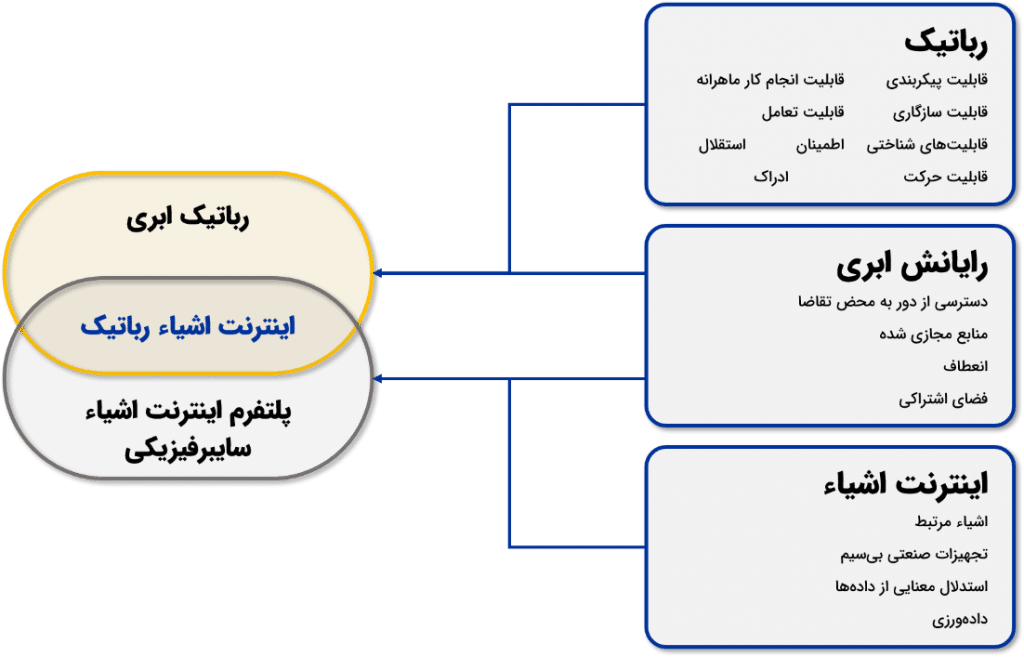
نشانههای اولیه از اینترنت اشیاء رباتیک را میتوان در پارادایمهای کنترل ربات ناهمگن و توزیع شده مانند سیستمهای ربات شبکهای، یا در رویکردهایی مانند رباتیک در همهجا (ubiquitous) و رباتیک ابری دید که منابع هزینهبر (resource-intensive) را در سمت سرور قرار میدهند. اولین بار ABI research واژه “اینترنت اشیا رباتیک”(Internet of Robotic Things) را در گزارشی مطرح نمود تا مفهومی را نشان دهد که در آن دادههای حسگرها از انواع منابع، با استفاده از اطلاعات محلی و توزیعشده ترکیب شده و برای کنترل و دستکاری اشیاء در جهان فیزیکی مورد استفاده قرار میگیرند. در این دیدگاه سایبرفیزیکی به اینترنت اشیاء رباتیک، حسگرها از فناوریهای تحلیل داده استفاده میکنند تا به رباتها اطلاعات بیشتر و غنیتری درباره انجام کار ارائه دهند تا این فرایند به اجرای بهتر منجر شود. هم اینترنت اشیاء و هم سیستمهای سایبرفیزیکی بنیان محکمی برای توسعه یک حوزه تحقیقاتی جدید یعنی اینترنت اشیاء رباتیک را فراهم نمودهاند. این مفهوم جدید تغییرات زیادی در حوزههای مختلف ایجاد کردهاست، از جمله سیستمهایی که باید در محیطهای چالش برانگیز کار کنند. برای مثال، سیستمهای IoRT را میتوان در صنایع تولیدی به طور مستقل و از راه دور در کارهای چالش برانگیزی مانند مونتاژ، بستهبندی، جوش، مدیریت کنترل کیفیت و غیره بهکارگرفت. علاوه بر این، سیستمهای IoRT خارج از محیط صنعتی (موزهها، محیطهای ورزش و سرگرمی) نیز، قابلیتهای خود را نشان دادهاند. با این وجود، توسعه آنها عمدتا به دلیل ضرورت ایجاد سیستمهای بههمپیوسته در صنعت ۴.۰ و یکپارچهسازی دنیای دیجیتال و فیزیکی است. در این سناریو، IoRT هسته اصلی سیستمهای اینترنت اشیاء رباتیک تعبیهشده است، که در آن رایانش ابری و شبکه میتواند برای انجام وظایف مفصل و مشروح به کار گرفته شود و به رباتها اجازه میدهد اطلاعات مختلفی را در میان انسانها و ماشینها به اشتراک بگذارند. طرحی از یکپارچهسازی رباتیک، رایانش ابری و اینترنت اشیاء را میتوان در شکل ۱ مشاهده کرد.
شکل ۱ نقاط برجسته رباتیک ، رایانش ابری و اینترنت اشیا ، که در اینترنت اشیا رباتیک یکپارچه می شوند (Romeo, Petitti, Marani, & Mile, 2020)
معماری پیشنهادی برای اینترنت اشیاء رباتیک دارای پنج لایه است، که شرح آن در زیر میآید.
1-3-3- لایه سخت افزار
این لایه پایینترین لایه معماری و متشکل از اشیاء فیزیکی مختلفی مانند رباتها، حسگرها، دستگاهها، وسایل نقلیه و غیره است که برای ارسال اطلاعات به لایه شبکه (لایه دوم) استفاده میشود. این لایه اطلاعات مربوط به محیط خود را به لایه بالاتر یعنی لایه شبکه، انتقال دهند.
2-3-3- لایه شبکه
این لایه نقش مهمی در ارائه انواع راهکارهای ارتباط تحت شبکه مانند Wi-Fi، بلوتوث، شبکه باند پهن و غیره دارد، انواع مختلف راهکارهای اتصال به شبکه در دومین لایه ارایه شدهاست. ارتباطات موبایل مانند۳G و LTE/4Gبوسیله این لایه ایجاد میشوند. فناوریهای ارتباطی چند سطحی، مانند WiFi، بلوتوث کم مصرف (Bluetooth Low Energy (BLE))، شبکههای کم توان بیسیم، بطور ویژه ۶LoWPAN ، و NFC، برای تسهیل اتصال یکپارچه اشیاء رباتیک نزدیک به یکدیگر در این لایه قرار داده شده است. فناوریهای ارتباطی برد متوسط مانندWiMAX ، Z-Wave، ZigBee و شبکه گسترده کم مصرف LoRA برای انتقال روان اطلاعات در زیرساخت شبکه رباتیک در وسعت بیشتری نیز در این لایه وجود دارد.
3-3-3- لایه اینترنت
لایه اینترنت که نقش مهمی در تامین کل ارتباطات دارد، اتصال به اینترنت بخش اصلی همه ارتباطات در معماری اینترنت اشیاء رباتیک است. به دلیل ویژگیهای انتخابی اضافه شده به پروتکلهای ارتباطی خاص اینترنت اشیاء، این لایه برای بهرهوری انرژی، مدیریت منابع محدود و پردازش سبکوزن اطلاعات به سیستمهای رباتیکی اضافه شده است.
4-3-3- لایه زیرساخت
لایه زیرساخت چارچوبی شامل رویکردهای رباتیک مبتنی بر اینترنت اشیاء، کلان داده، میان افزار و فرآیند کسبوکار، ارائه می دهد.پشته ابری (Cloud stack) رباتیک مبتنی بر اینترنت اشیاء، این بخش معماری را به ارزشمندترین لایه معماری (رویکرد خدمات ابری، میان افزار، فرآیندهای کسبوکار، و کلان داده) تبدیل کرده است. در واقع، این لایه مرکب از ۵ ترکیب متفاوت اما مرتبط شامل، پلتفرم رباتیک ابری، پشتیبانی از پلتفرم ابری M2M2A (machine to machine to actuator)، خدمات کسب و کار ابری، خدمات کلان داده، و زیرساخت رباتیک ابری اینترنت اشیاء است.
5-3-3- لایه کاربرد
این لایه بالاترین لایه معماری اینترنت اشیاء رباتیک است. لایه کاربرد وظایف مختلفی بر پایه کاربردهای رباتیک با استفاده از امکانات اینترنت اشیاء دارد. بعنوان مثالهایی از این دست میتوان به کنترل ربات صنعتی و پایش مصرف انرژی و آب با اتکا به فناوری زیرساخت میانافزار مبتنی بر اینترنت اشیاء به منظور یکپارچهسازی حسگرهای صنعتی و دستگاهها بر روی اتصال بیسیم، و یا روشی برای کنترل یک ربات صنعتی دارای بازوهای دوگانه با استفاده از فناوری تجاری اینترنت اشیاء در دسترس (ioBridge)، برای ساخت ماژول کنترل و پایش، که به برد ورودی/خروجی کنترلکننده ربات متصل است، اشاره نمود. از آنجا که سرویسهای نهایی که بطور ملموس مورد استفاده قرار میگیرد، محصول این لایه هستند، به نظر میرسد این مثالها مربوط به کلیت اینترنت اشیاء رباتیک است.
رباتهای متصل به شبکه اینترنت اشیاء در این لایه میتوانند مشارکت فعالی داشته باشند بطوریکه مشکلات متعدد مرتبط با سلامت، نگهداری زیر ساختها، مراکز دادهها، زیرساخت زبان توصیف خدمات وب (Web Service Description Language)، و بسیاری موارد دیگر را با استفاده از پروتکلهای این لایه حل کنند.
4-3- معماری شناختی رباتیک سایبر-فیزیکی
سیستمهای سایبرفیزیکی سیستمهای تعبیهشدهای هستند که از ترکیب ماژولهای محاسباتی و محیطهای فیزیکی بوجود آمدهاند. حوزه کاربرد این سیستمها نه تنها ماشینها و کارخانههای هوشمند، بلکه حمل و نقل هوشمند، ساختمانهای هوشمند، شهرهای هوشمند، فناوریهای پزشکی هوشمند و غیره است. در نتیجه یکپارچهسازی این سیستمها با فناوریهایی نظیر اینترنت اشیاء، تحلیل کلان داده، رایانش ابری و شبکههای حسگر بیسیم هسته اصلی صنعت ۴.۰ را تشکیل میدهد. اجزای اصلی زیرساخت این سیستم، محرکهایی برای تعامل با محیط، حسگرهایی برای ارزیابی محیط فیزیکی، و پردازش اطلاعات بدست آمده از موارد قبلی هستند، بنابراین پیشرفت این فناوریها، در توسعه سیستمهای سایبرفیزیکی تعیینکننده است.
یک معماری پنج سطحی برای سیستمهای سایبرفیزیکی پیشنهاد شدهاست. این معماری که به ۵C مشهور است شامل سطوح اتصال (Connection)، تبدیل (Conversion)، سایبر (Cyber)، شناخت (Cognition) و پیکربندی (Configuration) است. اتصال سطحی از معماری است که سیستمهای جمعآوری داده مانند حسگرها، منابع اطلاعات و پروتکلهای انتقالی را مدیریت میکند، تبدیل جایی است که دادهها پردازش شده و به دانش ارزشمند و قابلاستفاده تبدیل میشوند، سطح سایبر به عنوان مرکز اطلاعات این معماری عمل میکند. اطلاعات از دستگاههای مختلف به سمت این مرکز هدایت شده و بر اساس این اطلاعات شبکهای از ماشینهای هوشمند تشکیل میشود، شناخت منجر به بهینهسازی تصمیمات شده و پیکربندی بهعنوان کنترل نظارت بر خودپیکربندی و خود تطبیقدهی ماشین، بمنظور تلفیق سیستمهای سایبرفیزیکی با ماشینهای هوشمند جهت استفاده در صنعت طراحی شدهاست. از این رو، این سیستمها به دلیل ترکیب اینترنت اشیاء و کلان داده با دنیای صنعتی فیزیکی هسته اصلی یک کارخانه هوشمند بهشمار میروند.
برخی مطالعات برای کارخانههای هوشمند سیستم سایبرفیزیکی یکپارچه پیشنهاد کردهاند. این سیستم با ایجاد خدمات مبتنی بر ابر برای پایش، برنامهریزی فرآیندهای تولید، ماشینکاری و مونتاژ در محیط غیر متمرکز، برای دسترسی از راه دور و کنترل تجهیزات مورد استفاده در تولید مانند ماشینهای کنترل عددی کامپیوتری (Computer Numerical Control) کار میکند. نرمافزار CPS نقش مهمی در توسعه این نوع سیستمها ایفا میکند و باید در آن مسایل مربوط به تحلیل، طراحی، توسعه، تایید و اعتبار سنجی، و تضمین کیفیت نرمافزار در نظر گرفته شود. علاوه بر این، یک سیستم سایبرفیزیکی در همکاری ربات و انسان، که سیستم سایبرفیزیکی رباتیک مشارکتی (Collaborative Robotic CPS) نامیده میشود، سه ماهیت یکپارچه اصلی را پوشش میدهد؛ (۱) مؤلفه انسانی (Human Component (HC)) ، که از طریق فناوریهای واسط مختلف، به عنوان مثال، ردیابی دقیق موقعیت انسانی متصل شده است، (۲) مولفه فیزیکی (Physical Component (PC)) و (۳) مولفه محاسباتی (Computational Component (CC)). یک CRCPS با در نظر گرفتن معیارهای ایمنی و حفاظت به منظور افزایش بهرهوری توسعه داده میشود. چنین سیستمی قادر به استفاده از انواع حسگر و محرکها است و هدف آن تعامل بین هر سه مولفه است، و بعنوان مثال یک سیستم بینایی برای تشخیص، پیگیری و شناسایی حرکت نیروی انسانی فراهم میکند.
4- کاربردهای رباتیک صنعتی
رباتهای صنعتی با قابلیتهای متفاوتی از حواس و هوشمندی در فرآیندهای مختلف تولید مورد استفاده قرار میگیرند. در یک کارخانه معمول صنعت ۴.۰، رباتها با قابلیتهای پیشرفته بهدلیل دسترسی به اطلاعات مورد نیاز، شبکهسازی و فناوریهای حسگر قادر به همکاری مشترک با نیروی انسانی و همکاری با سایر رباتها در خط مونتاژ هستند. مجموعهای از اپلیکیشنهای برنامهریزی حرکت و مشارکت رباتها، روشهای تعمیر و نگهداری و اپلیکیشنهای تولید مبتنی بر بکارگیری ربات، ، کارخانههای آینده را شکل میدهند.
1-4- تولید
چهره صنایع تولیدی با جایگزینی انسان توسط دستگاههای متصل در فرآیندهای متعدد به طور کامل دگرگون شدهاست. صنایع تولیدی فعلی بهمنظور بهبود تولید و کسب سود اقتصادی در بسیاری از کشورهای پیشرفته به صنعت تولید هوشمند تبدیل شدهاست. در چند دهه قبل ماشینهایی بعنوان رباتهای صنعتی به جای انسان به کار گرفته شدند تا تولید سریعتر و دقیقتر را میسر کنند. با این حال، این رباتها به دلیل ناتوانی در انجام بسیاری از فرایندهای صنعتی در کارخانههای هوشمند و دشواری توسعه فناورانه، جوابگوی صنایع امروزه نیستند.
در کارخانههای هوشمند بهرهگیری از مزایای فناوریهای مبتنی بر حواس و اطلاعات، افزایش تعامل میان ماشینهای رباتیک و نیروی انسانی و همچنین میان خود رباتها، کیفیت تولید را بهبود بخشیده است.
با توجه به سطح بالای دقت، صحت، پایداری و سرعت رباتیک، میتوان ادعا کرد مدتهاست رباتیک در زمینههای مختلف سازماندهیشده در صنعت موفق بودهاست. در حالی که در سالهای اخیر در طی مراحل اولیه اجرا در حوزه زنجیره تامین، رباتیک مقرونبهصرفه عمل کردهاست، اما همیشه یک چالش هزینهبر بودن با آن همراه است، به این معنی که رباتها باید به درستی ارزیابی شوند تا ارزشمندی آنها با خطر مواجه نشود.
1-1-4- تولیدات مشترک انسان و ربات
امروزه در تولیدات صنعتی، نیاز به همکاری مشترک رباتهای صنعتی و کارگران انسانی روی یک شبکه ارتباطی افزایش یافتهاست، و این همکاری مشترک با توجه به پیشرفت جنبههای مختلف صنعت ۴.۰ میسر میشود. بعلاوه، این باور وجود دارد که تلفیق رباتهای صنعتی با فضاهای کاری انسانی، فرآیند تولید را اقتصادیتر و پیادهسازی بسیاری از برنامههای مشترک در کارخانهها را ممکن میسازد. با این حال، مسائل ایمنی همواره سدی بر سر راه همکاری انسان و ربات در یک فضای مشترک است. بدلیل وجود این دغدغه باید رباتهایی طراحی شوند که امکان انجام کار در فضای مشترک با انسان را به شکلی داشته باشند که منعطف و چابک بوده و حرکت آنها برای انسانها خطرات فیزیکی به همراه نداشته باشد. هنوز چنین رباتهایی که امکان انجام وظایف پیچیده را در کنار انسانها و در خطوط تولید و مراکز توزیع داشته باشند، توسعه نیافتهاند.
مطالعات زیادی با هدف همکاری انسانها و رباتها، با در نظر گرفتن مسائلایمنی نیروی انسانی انجام شده است. بر اساس این مطالعات یک سیستم تعامل انسان – ربات پیشنهاد شده است که ایمنی نیروی انسانی را با ردیابی و برآورد فاصله کارگران و رباتها ، تضمین نماید. در یک مطالعه جامع مکانیزمهای همکاری براساس سیستمهای سایبرفیزیکی بررسی شدهاند و در آن انواع مختلفی از حسگرها و محرکها برای ایجاد تعامل در میان مولفههایHC ، CC و PC، با توجه به چندین شاخص از جمله تخمین فاصله ایمن با استفاده از حسگرهای مختلف برای پایش موقعیت نیروی انسانی، هزینه، ریسک، سطح همکاری، سطح عملکرد و غیره مورد استفاده قرار میگیرند. حسگرها با در نظر گرفتن مولفههای ایمنی نظیر پایش میزان نیرو، در نظر گرفتن سرعت و فاصله و جداسازی کامل انتخاب میشوند. همچنین، با در نظر گرفتن تعداد حسگرها، نرخ داده دریافتی از حسگرها برای محاسبه شاخصهای عملکرد کلیدی، و در نظر گرفتن سرعت نیروی انسانی در همان فضای کاری که میتواند منجر به برخورد با ربات شود، و در نهایت زمان توقف ربات با محاسبه فاصله ایمن به منظور تامین امنیت نیروی انسانی تعیین میشود.
پردازش کلان داده دریافتی از فضای مشترک کاری انسانها و رباتها و کشف دانش از آن، رباتها را قادر به غلبه بر مسائل ناشی از عدم قطعیت و تصمیمگیری بهتر میکند. این نوع کلان داده صنعتی نه تنها شامل دانش بدستآمده از اجتماع رباتها و انسانها است، بلکه شامل دانش کسب شده توسط سایر رباتها در بخشهای مختلف کارخانه است که به اشتراک گذاشته میشود. یکی از مهمترین چالشها در همکاری انسان و رباتها چگونگی انتقال اطلاعات است، چرا که این همکاری مستلزم این است که رباتها از قبل درمورد نحوه حرکت انسانها و کارهایی که انجام میدهند، اطلاعات داشته باشند. در حال حاضر چنین تحلیل هوشمندانه و پیشگویانه برای جمعآوری، پردازش و انتقال کلان دادهوجود ندارد. هرچند بهزودی این تحلیلها با استفاده از همکاری پیشرفته بین نیروی انسانی و رباتهای صنعتی، سیستم سایبرفیزیکی برای برنامهریزی فعالیتهای رباتها، اجتناب از برخورد، و کنترل رباتها از طریق گفتار، حرکات و نشانهها فراهم خواهد شد.
2-1-4- رباتهای همکار تولید
علاوه بر همکاری ماشینها و انسانها، در کارخانههای هوشمند، رباتها به تشکیل اجتماعی از خودشان، همکاری با سایر رباتها، و بهاشتراکگذاری اطلاعات جمعآوریشده از کار خود در این جامعه نیاز دارند. چنین اشتراکگذاری به پیشرفت شبکه بیسیم بستگی دارد و هدف آن ارتقاء تواناییهای یادگیری رباتیک، پیشبینی، انعطافپذیری و تصمیمگیری در فرآیند تولید است. در رابطه با کارخانههای عصر صنعت ۴.۰، مطالعات زیادی دربارهچارچوبهای هوشمند یکپارچهسازی کارخانههای هوشمند براساس عوامل مستقل متشکل از لایه منابع فیزیکی، لایه شبکه صنعتی، لایه ابر، و لایه ترمینال کنترل نظارتی بمنظور دستیابی به قابلیت تصمیمگیری و مذاکره هوشمند رباتها در جهت پیادهسازی سیستم تولید خودکار انجام شده است.
2-4- نگهداشت
در کارخانهها، فرایند تعمیر و نگهداری یکی از مهمترین آیتمهای برنامهریزی برای تشخیص مشکلات و خرابی ماشینها و کاهش زمان توقف فرآیند به خاطر این مشکلات است. حتی با وجود نفوذ فناوریهای جدید، همچنان انسانها مسئول انجام این وظیفه هستند. اما برای دستیابی به قابلیت خودنگهداشت ماشینها چند سیستم پیشبینی شده است. به عنوان مثال، مدیریت پیشآگاهی و سلامت (Prognostics and Health management) زمینهای است که در آن ماشینها و رباتها از حسگرها و سامانههای پیشبینی عملکرد استفاده میکنند تا در طول عمر خود، سلامت سیستمها را به منظور تشخیص ناهنجاری ارزیابی کنند. توسعه اینترنت اشیاء فرصتهایی را فراهم میکند تا PHM به طور موثر در حوزه تولید به کار گرفته شود. افزایش سرعت تصمیمگیری، بهبود قابلیت اطمینان و پاسخگویی سریع در ابر، افزایش مسئولیتپذیری و شایستگی نیروی کار از نتایج بهرهگیری از این امکان است.
رباتها برای ردیابی و ارزیابی سلامت خود و کاهش افت عملکرد کلی تولید، به قابلیتهای خودآگاهی و خودنگهداشت نیاز دارند. پردازش کلان داده، رباتهای صنعتی را قادر به مدیریت سلامت و نگهداشت خود مینماید. مهارتهای رباتها در حوزه تولید و انجام وظایف جدید را میتوان با انتقال دانش کارگران به آنها، به منظور توسعه توانایی ابراز وجود (self-asserting) توسعه داد.
یک روش پیشنهادی برای تعمیر و نگهداری ربات و تشخیص خطا، این است که ارتعاش در یک ربات صنعتی با استفاده از شتابسنج اندازهگیری شده و از تبدیل فوریه سریع برای تحلیل طیف شنیداری ارتعاش استفاده شود. در این روش همچنین، خرابی فیزیکی یک ربات صنعتی مانند خراشیدگی، ترکخوردگی، ایجاد حفرههای ریز و درشت، ساییدگی، خم شدن و شکستگی با استفاده از تبدیل موجک گسسته و شبکههای عصبی مصنوعی تشخیص داده میشود.
3-4- مونتاژ
در کارخانههای نسل سوم انقلاب صنعتی خطوط مونتاژ کاملا خودکار هستند، اما با الزامات جدید تولید سازگار نیستند و ساخت، پیکربندی و برنامهریزی مجدد آنها برای برآورده ساختن نیازهای جدید بسیاری از خطوط تولید دشوار است. تولیدکنندگان به فرآیند مونتاژی که در آن انسانها و رباتها در کنار هم کار میکنند، و در آن فرآیند تولید بهینهسازی شده و زمان تصمیمگیری و معطل بودن دستگاهها به صورت خودکار پایش و وظایف مونتاژ به حداقل میرسد، نیاز دارند. چنین سیستمهای هوشمندی در کارخانههای عصر صنعت ۴.۰ تحقق مییابند.
سازگار کردن الگوهای جدید تولید و پیکربندی مجدد اتوماسیون، وظایف خط مونتاژ در طول تولید نیاز دیگر رباتهای صنعتی در یک کارخانه هوشمند است. در چارچوب صنعت ۴.۰، چگونگی فرایند مونتاژ با تمرکز بر کارهای غیرمعمول تغییر خواهد کرد، و نقش انسانها و رباتها در فرایند مونتاژ با توجه به قابلیتهای تعاملی آنها برای تضمین افزایش کاراییو کیفیت توضیح دادهشدهاست.
کلیدواژه ها
منایع
- Bayram and G. İnce, “Advances in Robotics in the Era of Industry 4.0. In,” in Industry 4.0: Managing The Digital Transformation , Springer, 2018, pp. 187-200.
- “THE FOURTH INDUSTRIAL REVOLUTION, ROBOTICS, AND ARTIFICIAL INTELLIGENCE,” [Online]. Available: https://www.pgcareers.com/fourth-industrial-revolution. [Accessed 2020].
-
Robot density rises globally,” International Federation of Robotics, 2018. [Online]. Available: https://ifr.org/ifr-press-releases/news/robot-density-rises-globally.
- Romeo, A. Petitti, R. Marani and A. Mile, “Internet of Robotic Things in Smart Domains: Applications and Challenges,” Sensors, 2020.
- Nalpantidis and A. Gasteratos, ” Stereo vision for robotic applications in the presence of non-ideal lighting conditions.,” Image and Vision Computing, pp. 940-951, 2010.
“What is Structured Light Imaging?,” Robotics Tomorrow, 2018. [Online]. Available: https://www.roboticstomorrow.com/article/2018/04/what-is-structured-light-imaging/11821.


 شهره مهرآسا
شهره مهرآسا